










Services on Demand
Article
 English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
Indicators

Related links
-
 Cited by Google
Cited by Google -
 Similars in Google
Similars in Google
Share

 Permalink
PermalinkJournal of Energy in Southern Africa
On-line version ISSN 2413-3051
Print version ISSN 1021-447X
J. energy South. Afr. vol.28 n.4 Cape Town Nov. 2017
http://dx.doi.org/10.17159/2413-3051/2017/v28i4a2395
ARTICLES
Transient stability control by means of under-frequency load shedding and a hybrid control scheme
P. F. Le Roux; R.C. Bansal*
Department of Electrical, Electronics and Computer Engineering, Engineering Building 1, University of Pretoria, Pretoria 0002, South Africa
ABSTRACT
An electrical network constantly faces unforeseen events such as faults on lines, loss of load and loss of generation. Under-frequency load shedding and generator tripping are traditional methods used to stabilise a network when a transient fault occurs. These methods will prevent any network instability by shedding load or tripping the most critical generator at a calculated time when required. By executing these methods, the network can be stabilised in terms of balancing the generation and the load of a power system. A hybrid control scheme is proposed where the traditional methods are combined to reduce the stress levels exerted on the network and to minimise the load to be shed.
Keywords: transient disturbances; centre of inertia (COI)-referred frame index; power system stability
1. Introduction
When a transient fault occurs in a power network, the voltage drops almost instantaneously. This reflects clearly in the active and reactive loads of the network and creates a mismatch between the total generation and total load. This information was verified at power stations in South Africa. There are different types of network disturbances, namely: i) transmission line faults, ii) loss of load, iii) loss of generation, and iv) loss of transformers [1]. Transient stability is one of the most vital aspects to take into consideration when designing a power system. Transient stability takes place within a short period of time, making it impossible for operator to alleviate its occurrence. It should therefore be considered during the design phase of the network [1-2].
One of the main issues that industry is facing today is network instability in a power system that might lead to the loss of voltage and decrease of frequency, resulting in blackouts. Blackouts occur every day in different parts of the world [3], but can be prevented by making use of techniques such as generator excitation control, generator-tripping schemes, braking resistors, fast-valving, eliminating time, removal of charge and series capacitors [4].
This investigation focuses on a comparison between an under-frequency load shedding (UFLS) scheme and a hybrid control scheme which consists of combining generator-tripping with UFLS. The benefit of the hybrid control scheme is that less load is shed and the stress levels on the network are significantly lower when a transient fault occurs.
Transient instability can be discovered and controlled by making use of the following techniques: solving the state space differential equations [4]; direct methods, such as area-based centre of inertia (COI)-referred frame and the energy function concept [5]; catastrophe theory [6]; artificial neural networks [7]; pattern recognition techniques [8]; and hybrid techniques combining neural networks and pattern recognition [9].
Functioning of electrical networks continually faces occurrences such as generation outages and faults. Glavic and Van Cutsem [10] present a survey on different voltage instability detection methods. Voltage instability recognition has two approaches, namely data concentrated at one location, and wide-area monitoring. Investigating voltage security monitoring, the voltage reliability assessment index as the slope of the AQV curve of each bus was established, where AQ characterises the change of reactive power and AV the change in voltage of each bus. The system becomes unstable at the specific bus when the index approaches zero. By measuring the difference between the voltage reliability indexes of all the buses in the network, the bus with the lowest reliability index is the bus expected to become unstable.
Hu and Venkatasubramanian [11] developed algorithms that identify the fast parting of the phase angles through synchrophasor data collected by phasor measurement units (PMUs) at specific buses in a network. When the system becomes unstable, the most suitable action is taken in a specific area, e.g., tripping unstable generators or shedding load. The two algorithms were based on the phase angle and the energy function concept. For the phase angle method, the COI-referred frame [11] was utilised to establish whether the generators were accelerating or decelerating away from the network. When a generator's rotor angle exceeded a specific set point, generator tripping or load shedding control was implemented. A generator tripping (acceleration of angle) or load shedding (decelerating of angle) scheme was applied, when a generator surpassed the threshold. Sherwood et al. [5] provide an explanation of the phase angle method as well as a detailed explanation on the energy function concept. The energy function algorithm formulated using kinetical and potential energy was developed in a similar way to the phase angle algorithm. The results indicated whether the generator's rotor angle accelerated or decelerated away from the power system.
The work by Hashim et al. [12] was also based on the rotor angle method, but took into account each generator's rotor speed in each area. It was found that, when the COI-referred frame index of each area goes above a defined set point, the generators lose synchronism with the power system and goes out-of-step (OOS) [12]. Wahab and Mohamed [13] proved that the area-based COI-referred frame index method can recognise transient instability when a fault occurs by determining the weakest area in the electrical network.
Many different UFLS schemes exist and can be divided into the traditional [14], semi-adaptive, self-adaptive [15], and computer-aided algorithm [16]. Zhang et al. [17] developed an algorithm to determine the location of the load to be shed by using the rate of frequency change and voltage sensitivity. The voltage stability was to determine the location of the load to be shed. After an amount of load was shed, the stability of the network was recovered.
In Terzija's [18] research, the main problems were established: i) estimation of magnitude of the disturbance, ii) disturbance localisation, iii) derivation of control, and iv) distribution of control actions throughout the power system. The first two problems were identified as estimation problems and the final two as control problems. Seyedi et al. [19] conducted research on a new centralised adaptive loadshedding algorithm to mitigate power system blackouts. Instead of ranking the voltages of all buses before deciding on the location of load shedding, the change in reactive power and voltage (AQV) margin was calculated. The UFLS and under-voltage load shedding (UVLS) scheme were combined to prevent any false trips in the network. Some other aspects were also considered in this research, such as using the swing equation to estimate the disturbance magnitude, the rate-of-change of frequency, and the load shedding speed.
Dong and Pota [20] conducted research on a fast transient stability assessment using large step size numerical integrations using the K-T formulation to develop the numerical integration. By using larger step sizes than usual, the results obtained were much faster, so that transient stability detection could be done online and monitored with an energy management system. Solving sets of simultaneous differential and algebraic equations in a time domain without system reduction was used to determine the first swing in an electrical network by Dong and Pota [21]. It was found that computational speed was significantly less than those of the contemporary methods and techniques based on Lyapunov's direct method [21]. The proposed method was proven to be a significant improvement because of its ability to incorporate different modelling requirements such as: automatic control executions, successive contingent events, effect of loads, and different machine models.
Excitation control was implemented on a transient first swing by Fouad et al. [22], where the transient energy function was developed by making use of excitation control and applying it to two networks for testing purposes.
This investigation concludes that it is highly recommended and needs to be considered when designing a power system because of the reduction in load shedding and stress exerted on the power network when a transient fault occurs.
2. Proposed methodology
2.1 The COI-referred frame index
It is assumed while conducting this research that (i) all the generators in each area of the power system are running in synchrony before any fault occurs, and (ii) one generator represents all the generators in a specified area. The COI- referred frame index is used to track the stability of the power system.
The algorithm applied is derived from the research conducted by J. A. Ning et al. [3], where the phase angle values were applied to determine the instability in the two-area network of the Institute of Electrical and Electronics Engineers (IEEE). In this study, however, all simulations were based on the IEEE 39-bus network. The phase angle algorithm was performed in two stages by calculating each area of the network's angle stability and the entire network's angle stability. The area-based COI-re-ferred frame method δC0Ican be formulated as in Equation (1).

where H; is the inertia constant,  ; is the rotor angle and N is the total number of areas. Measuring the rotor angle and the inertia of a generator is complex, so the high voltage side phase angle can be utilised as an estimation to the rotor angle, whereas at the high voltage side of the generator inertia of the generator can be estimated by active power injections. Making use of voltage phase angle and active power of the generator, all areas in the power system can be formulated as in Equation 2.
; is the rotor angle and N is the total number of areas. Measuring the rotor angle and the inertia of a generator is complex, so the high voltage side phase angle can be utilised as an estimation to the rotor angle, whereas at the high voltage side of the generator inertia of the generator can be estimated by active power injections. Making use of voltage phase angle and active power of the generator, all areas in the power system can be formulated as in Equation 2.

where  and
and  denote the phase angle and the active power at bus j and area i. Slcrefers to the COI-referred frame index in that specific area. This will be the same when calculating the COI-referred frame for the whole system in Equation 3.
denote the phase angle and the active power at bus j and area i. Slcrefers to the COI-referred frame index in that specific area. This will be the same when calculating the COI-referred frame for the whole system in Equation 3.

The area equivalent rotor angle can subsequently be demonstrated in the COI-referred frame according to Equation 4.

At chosen areas in the network these values are collected from phasor measurement units (PMUs). More precise referred angles can be acquired by increasing the number of PMUs in the system. These measurements are then concentrated at a central point by applying synchrophasor technology where the data can be recorded and used for technical review.
It can be assumed that area i is moving towards separation from the whole network when the COI angle  of each area starts to expand beyond a predetermined threshold from the COI angle Scfor the whole network. When generators are separated from their networks, there are two principal controls that can be applied, namely: generator tripping and load shedding. Generator tripping can be applied when the generator angle increases (accelerates) away from the network beyond a pre-determined threshold, whereas load shedding can be applied when the generator angle decreases (decelerates) beyond a pre-determined threshold.
of each area starts to expand beyond a predetermined threshold from the COI angle Scfor the whole network. When generators are separated from their networks, there are two principal controls that can be applied, namely: generator tripping and load shedding. Generator tripping can be applied when the generator angle increases (accelerates) away from the network beyond a pre-determined threshold, whereas load shedding can be applied when the generator angle decreases (decelerates) beyond a pre-determined threshold.
2.2 Traditional UFLS scheme
To implement the UFLS scheme, the following steps need to be executed [13]:
(i) Calculate the amount of anticipated load (L). This parameter plays an important role for the protection to be provided. If a power system is balanced, there will be no anticipated load. The anticipated load is expressed per unit by Equation 5.

(ii) With the calculated anticipated load as observed in Equation 5, the total amount of load to be shed (LD) can be calculated by Equation 6.

where d is the load reduction factor, fminis the minimum allowed frequency, which is normally used as 49.3 Hz, and fnis the nominal frequency.
In the second step, consider a dynamic simulation by making use of the COI-referred frame index as described in Section 2.1. By creating multiple three phase faults on different lines, unstable states can be determined.
(iii) To see where the load should be shed, determine the voltage on all buses and shed the load according to the severity of voltage decline after a three-phase fault was created.
(iv) After all loads were ranked in (iii), the total load to be shed as given by Equation 6 (LD) can now be divided into sections: 20%, 20%, 30%, and 30%. The first UFLS phase to be implemented will be at the most critical buses, where the voltage decline is the highest.
(v) Finally, run the dynamic simulation with the proposed UFLS scheme. By simulating an unbalanced system with a fault clearing time of 100 ms, implement the UFLS scheme stage one. If the power network stabilises, stop the UFLS scheme; if the network does not stabilise, implement stage two, then three and finally four until the network stabilises.
2.3 Proposed hybrid scheme
The proposed hybrid scheme consists of combining UFLS with generator tripping. All stages listed in Section 2.2 will be carried out, but generator tripping will be implemented at stage one. If the network does not stabilise, the UFLS control scheme will be implemented. The hybrid scheme reduces the total load to be shed and will also reduce the stress exerted on the network.
3. Execution of the proposed methodology
3.1 The COI-referred frame index
The COI-referred frame index was applied on the IEEE 39-bus power system, also known as the 10-machine New-England power system. The IEEE 39-bus power system is made up of 10 generators of 5620 MW, 12 transformers, 46 transmission lines, and 19 loads of 6278 MVA.
The main reason for the COI-referred frame index is to determine if and when the network reaches an unstable state. It will also obtain the dynamic rotor angle performance of each generator in its specific area in the power system during disruptions with a time domain simulation method. Three-phase faults were simulated at different points in the power network to simulate the rotor angle's response. These faults were performed to see if and when a generator goes out-of-step (OOS). The local and remote circuit breaker of the line will be opened to isolate the line when a three-phase fault occurs on a particular transmission line in the network.
If a rotor angle of a generator overreaches ±180° in approximately two seconds, the power system is said to be unstable [13]. The area-based COI-re-ferred frame index method is applied to detect the weakest areas in the network in advance where, as a result, corrective actions can be carried out to keep the network stabilised, i.e., generator tripping or load shedding.
Figure 1 displays the IEEE 39-bus network divided into three areas. The areas were chosen in relation to the coherency of the generators when subjected to a three-phase fault [23], [24]. When a fault occurs, the network can stay stable or become unstable, depending on the type and duration of the fault.
3.2 The UFLS and hybrid control scheme
In this section three case studies will be considered, each in a different area to indicate the effectiveness of the proposed control schemes.
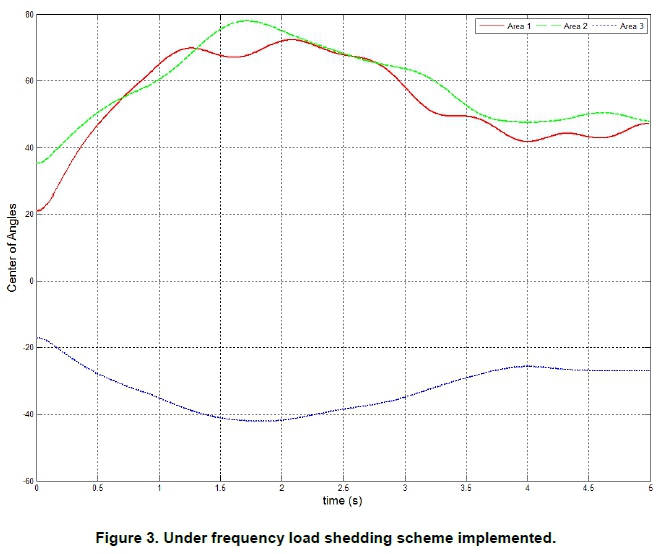
Case 1. A three-phase bolted fault was simulated between bus 2 and 25 with a fault duration of 100 ms. After 100 ms, the fault was cleared and the COI-referred frame index method provided information, as seen in Figure 2, indicating whether the network is stable or unstable. In this case, Figure 2 shows that the network becomes unstable. The first response was to implement the traditional UFLS scheme.
According to the frequency of the network, the UFLS scheme was implemented at 49.3 Hz. By simulating the frequency of the power system, it was determined that at approximately 0.8 seconds the frequency went below 49.3 Hz. More simulations were done to establish the amount of load to be shed in order to stabilise the network; it was found to be 1662.58 MVA. Figure 3 shows that the network stabilised and did not exceed 80 degrees in magnitude. The next simulation was to implement the hybrid control scheme, i.e. generator tripping first and then, if the network did not stabilise, implementing the UFLS scheme. To implement generator tripping, which generator goes OOS first must initially be identified. As Figure 2 shows, area one got OOS first.
Figure 4 shows generator nine went OOS first in area one; following that generator nine should, therefore, be tripped at the first control stage and load shed for the remaining stages if necessary. Note that, by implementing the hybrid control scheme instead of the traditional UFLS scheme, the stress level on the network is much lower. In this case, there was no need to implement load shedding after stage one was implemented (generator tripping), as shown in Figure 5.
A comparison between Figures 3 and 5 shows that the network was experiencing much less stress by implementing the hybrid control scheme.
Case 2. In area two a three-phase fault was created between bus 16 and 17 with a fault duration of 100ms. After the fault was cleared, the COI-referred frame index was used to establish the status of the network as seen in Figure 6, which shows that the network became unstable after the transient fault. The UFLS would be implemented first to see if the network would stabilise.
Because the traditional UFLS scheme was being implemented, the load needed to be shed at 49.3 Hz. By simulating the frequency for this specific scenario in area two, the power system went below the minimum frequency at 0.4 seconds. More simulations indicated that the network would stabilise when 1265 MVA load was shed. Figure 7 shows that the network stabilised after implementing the UFLS scheme and did not exceed 95 degrees in magnitude.
Because the UFLS scheme information was established, the hybrid control scheme could be implemented. The hybrid control scheme was executed in the same manner as in case one. First it had to be established which generator is most critical and, in this case, Figure 6 shows that area two goes OOS first. With this information, it could now be determined which generator went OOS first in that specific area. According to Figure 8, generator five went OOS first; therefore, by using the hybrid control scheme, generator five should be tripped in the first stage. If the network does not stabilise, UFLS should be implemented until the network stabilises.
By implementing only stage one (generator tripping) with this specific scenario, the network did not stabilise but did so after implementing stage two (load shedding). Stage two consists of 20% of its surrounding buses according to the voltage decline; therefore generator tripping and load shedding were necessary in this case. Figure 9 illustrates that the stress levels were just above 75 degrees using the hybrid control scheme whereas in Figure 7 with the traditional UFLS scheme it was at 95 degrees. Thus, by implementing the hybrid control scheme, less stress was exerted on the network.
Case 3. A three-phase fault was simulated on the line between bus 8 and 9 as indicated in Figure 1, area three, with a fault duration of 100ms. The status of the power system was determined by the COI-referred frame index method illustrated in Figure 10, which, by examination, showed that the network went OOS.
The UFLS would now be implemented to stabilise the network thus: load shedding will take place if the frequency exceeds 49.3 Hz. The frequency of the power system was simulated and exceeded the minimum frequency at 0.65 seconds. It was found that the amount of load to be shed was 1298.46 MVA to stabilise the network. Figure 11 indicates that the network stabilised with a stress level of just above 125 degrees.

The next step was to simulate the same three-phase fault but implement the hybrid control scheme to stabilise the electrical network. As seen in the previous case studies, the starting point was to identify the area that went OOS first as well as the generator in that area; in this case Figure 10 shows that area three went OOS first.
There was only one generator in area three, thus generator one should be tripped at the first stage. If the network did not stabilise after stage one was implemented, the hybrid control scheme would continue, implementing load shedding. After the first stage was implemented, the network stabilised with a stress level of 100 degrees. An inference can be made by comparing Figures 11 and 13 that the stress level on the network was less when using the hybrid control scheme.

4. Conclusions
The traditional under-frequency load shedding (UFLS) scheme was compared with the proposed hybrid control scheme, where generator tripping was implemented at stage one and UFLS at stages two, three and four until the network stabilised. It was found that by implementing the proposed hybrid control scheme less load needed to be shed to stabilise the network. Also, the stress level on the network was significantly less by implementing the hybrid control scheme rather than the traditional UFLS scheme and by implementing the hybrid control scheme instead of the traditional UFLS scheme, less load needs to be shed, resulting in less stress exerted on the electrical power system.
References
[1] Kundur, P., Balu, N. J. and Lauby, M. G. 1994. Power system stability and control. 7: McGraw-hill New York. [ Links ]
[2] Pavella, M., Ernst, D. and Ruiz-Vega, D. 2000, Transient stability of power systems: a unified approach to assessment and control: Springer Science and Business Media. [ Links ]
[3] Ning, J. A., Liu, X. and Venkatasubramanian, V. M. 2013. Distributed real-time stability monitoring algorithms using synchrophasors. Bulk Power System Dynamics and Control-IX; Optimization, Security and Control of the Emerging Power Grid, Rethymnon, Greece 1-5. [ Links ]
[4] Brown, H., Happ, H., Person, C. and Young, C. 1965. Transient stability solution by an impedance matrix method. IEEE Transactions on Power Apparatus and Systems 84: 1204-1214. [ Links ]
[5] Sherwood, M., Hu, D. and Venkatasubramanian, V. M. 2007. Real-time detection of angle instability using synchrophasors and action principle. in Bulk Power System Dynamics and Control-VII. Revitalizing Operational Reliability, IREP Symposium, Charleston, SC, USA 1-11. [ Links ]
[6] Wang, Z., Aravnthan, V. and Makram, E. B. 2011. Generator cluster transient stability assessment using catastrophe theory. in 10th International Conference, Environment and Electrical Engineering (EEEIC), Rome, Italy 1-4. [ Links ]
[7] Zhou, D. Q., Annakkage, U. and Rajapakse, A. D. 2010. Online monitoring of voltage stability margin using an artificial neural network. IEEE Transactions on Power Systems 25: 1566-1574. [ Links ]
[8] Yan, P., Sekar, A. and Rajan, P. 2000. Pattern recognition techniques applied to the classification of swing curves generated in a power system transient stability study. Proceedings of the IEEE Southeastcon 493-496. [ Links ]
[9] Chang, C., Srinivasan, D. and Liew, A. 1994. A hybrid model for transient stability evaluation of interconnected longitudinal power systems using neural network/pattern recognition approach. IEEE Transactions on Power Systems 9: 85-92. [ Links ]
[10] Glavic, M. and Van Cutsem, T. 2011. A short survey of methods for voltage instability detection. IEEE Power and Energy Society General Meeting 1-8. [ Links ]
[11] Hu, D. and Venkatasubramanian, V. 2007. New wide-area algorithms for detection and mitigation of angle instability using synchrophasors. IEEE Power Engineering Society General Meeting, Tampa, FL, USA: 1-8. [ Links ]
[12] Hashim, H., Zulkepali, M., Omar, Y., Ismail, N., Abidin, I. and Yusof, S. 2010. An analysis of transient stability using center-of-inertia: angle and speed. IEEE International Conference on Power and Energy (PECon), Kuala Lumpur, Malaysia 402-407. [ Links ]
[13] Abdul Wahab, N. I. and Mohamed, A. 2012. Area- based center-of-inertia-referred rotor angle index for transient stability assessment and control of power systems. Abstract and Applied Analysis: 1-23. [ Links ]
[14] Zhang, C., Wang, P. and Fang, Y. 2013. Emergency control strategy based on frequency and voltage stability. Power System Protection and Control 41: 149-155. [ Links ]
[15] Zhang, M., Bi, S., Liu, H. and Xue, C. 2011. Review of frequency stability for islanded power system. Power System Protection and Control 39: 149-154. [ Links ]
[16] Xiong, F., Zhou, Z. and Zhou, Q., 2005. Study of under frequency load shedding scheme based on load frequency characteristics. Proceedings of the CSEE, 19: 1-9. [ Links ]
[17] Zhang, Z., Wang, Z. and Fang, P. 2014. Study on emergency load shedding based on frequency and voltage stability. International Journal of Control & Automation 7: 119-130. [ Links ]
[18] Terzija, V. V. 2006. Adaptive underfrequency load shedding based on the magnitude of the disturbance estimation. IEEE Transactions on Power Systems 21, 1260-1266. [ Links ]
[19] Seyedi, H. and Sanaye-Pasand, M. 2009. New centralised adaptive load-shedding algorithms to mitigate power system blackouts. IET Generation, Transmission & Distribution 3: 99-114. [ Links ]
[20] Dong, Y. and Pota, H. 1991. Fast transient stability assessment using large step-size numerical integration. IEE Proceedings C-Generation, Transmission and Distribution 138: 377-383. [ Links ]
[21] Dong, Y. and Pota, H. R. 1991. Determination of the first swing stability by solving simultaneous differential and algebraic equation set without system reduction. IEEE Region 10 International Conference on EC3-Energy, Computer, Communication and Control Systems, New Delhi, India 1: 382-385. [ Links ]
[22] Fouad, A., Vittal, V., Ni, X., Pota, H., Nodehi, K., Zein-Eldin, H. M., Vasahedi, E. and Kim, J. 1989. Direct transient stability assessment with excitation control. IEEE Transactions on Power Systems, 4: 75-82. [ Links ]
[23] Yusof, S., Rogers, G. and Alden, R. 1993. Slow coherency based network partitioning including load buses. IEEE Transactions on Power Systems 8: 1375-1382. [ Links ]
[24] Xie, D., He, H., Chang, X. and Yao, X. 2010. An approach to design power system under frequency load shedding scheme taking coherent area and global optimization into account. Power System Technology 6: 106-112. [ Links ]
* Corresponding author: Tel: +27 12 4205446: email: rcbansal@eee.org


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}